 通过微信联络
通过微信联络 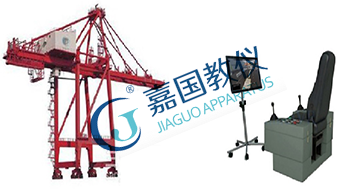
(特别说明:长沙嘉国教仪所供应的教学实验设备均可根据用户实际需求进行定制化设计与生产,以下为实验设备基础参数,如需定制请电话联系)
一、整体技术性能:
1、实训操作系统:
1.1、具有岸边集装箱桥式起重机的训练功能;
1.2、座椅、面板开关、控制器等操作均采用实机部件,驾驶台布局与实机高度一致;
1.3、能够真实再现岸桥起重机操作过程中各部位的动态响应;
1.4、实训装置具备良好的兼容性和可扩充性,为以后升级改造提供便利;
二、实训内容:
1、岸桥部分:
1.1、开机、关机、信号指示灯
1.2、大车行走、调速(电缆卷筒装置同步、电缆卷筒联锁保护)、制动、复位、紧急制动、复位、防撞功能、超速保护、信号指示灯;
1.3、小车行走、调速、制动、复位、紧急制动、复位、防撞功能、超速保护、信号指示灯;
1.4、前桥俯仰、制动、复位、紧急制动、复位、终点限位急停、复位、超速保护、信号指示灯;
1.5、起升、调速、超速保护、终点限位急停、复位、制动、复位、紧急制动、复位,下降、调速、超速保护、制动、复位、紧急制动、复位、信号指示灯。
1.6、照明灯光。
2、吊具部分:
2.1、接通吊具电源、信号指示灯;
2.2、吊具导板收、放(海侧放下、陆侧放下、左侧放下、右侧放下、全部放下和全部收起)、信号指示灯;
2.3、吊具开、闭锁,限位开、闭锁、信号指示灯;
2.4、吊具前后倾、限位急停、复位、左右倾、限位急停、复位、信号指示灯;
2.5、吊具水平回转、限位急停、复位、信号指示灯。
2.6、超重保护、偏载保护、着箱信号指示灯。
3、故障诊断与维修
3.1、岸桥部分:
3.1.1、大车行走制动打滑;紧急制动失效;
3.1.2、小车行走不能调速;
3.1.3、下降终点限位急停失效;
3.2、吊具部分:
3.2.1、电源指示灯无信号;
3.2.2、吊具导板不能同时收、放、有指示灯信号;
3.2.3、吊具不能开锁、不能闭锁、指示灯无信号;
3.2.4、吊具不能水平回转、指示灯有信号。
3.2.5、超载保护、偏载无保护、着箱无保护、指示灯无信号。
三、技术规格要求:
1、系统硬件技术参数
岸边桥式起重机综合实训装置主要硬件包括:岸桥实体、司机操作台、运行软件、显示终端系统、电气控制柜。
1.1、司机联动操作台根据实际市场上主要生产厂家的岸边起重机驾驶操作台改造而成,大小尺寸与实际一致,采用实车上的仪表、面板开关、指示灯及控制器系统,布局与实机保持一致。
1.2、电气控制系统(电控柜)包含:外电接入、强电区,弱电区,分路控制单元(安川系例、西门子系例)、照明单元、通讯单元、仪表单元、15寸触控一体显示屏等;
1.3、实训装置组合形式为可拆装式;
1.4、实训装置整体布置占地面积为不大于35平方米(含四周1米安全间距),动态最大高度为3.1米。
1.5、岸边桥式起重机综合实训装置,准确模拟起重机运行过程中的实时位姿状态,具体参数如下:
1.5.1、有效载荷:60kg,总载荷:约1200kg(平台重量);
1.5.2、系统响应频率:0.0HZ~20HZ;
1.5.4、 平台具有俯仰(α)、平行回转(β)、垂直升降(z)、纵向位移(y)、
侧向位移(x)等能力,对应速度分别为±20°/s、±200mm/s;对应角加速度分别为±60°/s、4m/s2;
2、系统技术阐述:
系统主要由岸边桥式起重机综合实训装置、控制硬件与软件、司机操作台等部分组成。
2.1、具备市场上主要生产厂家的岸边集装箱桥式起重机各执行机构的训练功能,并能达到实际设备各机构的运行动作要求。可以实时显示负载指标、空中吊车的位置,具备管理系统。实训装置可以响应各种操作,包括设备运动、冲击、加减速,超速、超载紧急停止的位置速度反应等。可实时吊装集装箱货物,实时故障报警等。
2.2、起重机吊具是根据实际工程用吊具缩小的,其动态特性与实际工况对应一致。
附:主要仪器设备清单:
|
序号 |
名称 |
型号、产地 |
功能 |
主要参数 |
台 |
|
1 |
CPU模块 |
6ES7315-2AG10-0AB0、德国西门子 |
PLC模块 |
|
1个 |
|
2 |
电源模块 |
6ES7307-1EA00-0AA0、德国西门子 |
PLC模块 |
|
1个 |
|
3 |
MMC卡 |
6ES7953-8LG00-0AA0、德国西门子 |
数据存储 |
64 KB |
1个 |
|
4 |
IM365 |
6ES7350-1BA01-0AA0、德国西门子 |
PLC模块 |
|
2个 |
|
5 |
ET-200M |
6ES7 153-1AA03-0XA4、德国西门子 |
PLC模块 |
|
1个 |
|
6 |
输入模块 |
6ES7321-1BH02-0AA0、德国西门子 |
PLC模块 |
|
7个 |
|
7 |
输出模块 |
6ES7322-1BH01-0AA0、德国西门子 |
PLC模块 |
|
4个 |
|
8 |
基板 |
6ES7390-1AE80-0AA0 |
PLC模块 |
|
1个 |
|
9 |
基板 |
6ES7390-1AF30-0AA0 |
PLC模块 |
|
1个 |
|
10 |
接口模块 |
6ES7365-0BA01-0AA0 |
PLC模块 |
|
2个 |
|
11 |
前连接器 |
6ES7392-1AJ00-0AA0 |
PLC模块 |
|
11个 |
|
12 |
电动机(安川) |
SEW、380V 1.5KW、 |
大车行走 |
电磁制动 |
2台 |
|
13 |
电动机(安川) |
SEW、380V 1.5KW、 |
小车行走 |
电磁制动 |
1台 |
|
14 |
电动机(安川) |
SEW、380V 2.2KW |
吊具升降 |
电磁制动 |
1台 |
|
15 |
电动机(安川) |
SEW、380V 1.1KW |
吊具纵横倾斜 |
电磁制动 |
4台 |
|
16 |
电动机(安川) |
SEW、380V 1.5KW |
前桥变幅 |
电磁制动 |
1台 |
|
18 |
电动机(安川) |
SEW、380V 0.55KW |
吊具水平回转 |
1台 |
|
|
19 |
电动机(安川) |
SEW、380V 0.55KW |
电缆同步收放 |
1台 |
|
|
20 |
变频器(安川) |
EV1000系例 |
大车行走 |
380V 2.2KW |
2台 |
|
21 |
变频器(安川) |
EV1000系例 |
小车行走 |
380V 2.2KW |
1台 |
|
22 |
变频器(安川) |
EV1000系例 |
吊具升降 |
380V 4.0KW |
1台 |
|
23 |
伺服控制器(安川) |
7系例 |
吊具纵横倾斜 |
380V 2.2KW |
4台 |
|
24 |
变频器(安川) |
EV1000系例 |
前桥变幅 |
380V 2.2KW |
1台 |
|
25 |
电动伺服缸 |
LK系列 |
吊具吊钩锁止 |
|
4台 |
|
26 |
伺服控制器(安川) |
7系例 |
吊具水平回转 |
380V 1.1KW |
1台 |
|
27 |
伺服控制器(安川) |
7系例 |
电缆同步收放 |
380V 1.1KW |
1台 |
|
28 |
称重传感器 |
ZM系例 |
吊具称重 |
100 |
4台 |
|
29 |
触摸屏 |
GP2500-TC41-24V |
普罗费斯 |
24v |
1台 |
|
30 |
接触器 |
A16-30 |
ABB |
|
8个 |
|
31 |
继电器 |
MY2NJ(带底座) |
欧姆龙 |
|
30个 |
|
32 |
主令控制器 |
DQT18-ZX2/K04 |
大连 |
|
2个 |
|
33 |
端子排 |
TD-AZD15 |
|
16A |
10个 |
|
34 |
指示灯 |
SAD16-22D/S31 |
|
红/黄/绿 |
31个 |
|
35 |
二挡转换开关 |
SAY7(D) BE102C |
|
|
21个 |
|
36 |
塑料线 |
BVR1.5 |
|
|
4盘 |
|
37 |
电脑 |
联想 |
|
|
1台 |
|
38 |
桥式起重机实训装置 |
文凯自动化JGQSQ-A型 |
|
|
1台 |
|
39 |
单箱吊具 |
文凯自动化JGDJ-C型 |
0.6×0.15×0.16米 |
|
1台 |
|
40 |
集装箱 |
文凯自动化JGJZM-A型 |
0.6×0.15×0.16米 |
|
1台 |
|
41 |
开放式电气控制柜 |
文凯自动化 |
强电、弱电 |
1.2×0.5×1.6米 |
2台 |
|
42 |
岸边桥式起重机联动操作平台 |
文凯自动化 |
操纵杆、功能开关、指示灯组合 |
|
1套 |
|
43 |
其它辅助件(外接线缆、空气开关等) |
文凯自动化 |
|
|
全套 |
地址:长沙高新开发区麓云路100号(10号车间)101-C3区
Copyright©2019 长沙市嘉国教学仪器有限公司 All Rights Reserved. ICP备案号湘ICP备13007869号-1 3MUN